Skip to primary navigation
Skip to content
Skip to footer
Youngdo 🐂
Blog
CV
Toggle search
Toggle menu
Toggle menu
Home
/
Blog
/
Robotics
Youngdo Lee
M.S. Candidate
Follow
Seoul, Korea
Email
Twitter
Facebook
LinkedIn
Instagram
GitHub
Toggle menu
📂
Total
180
AI
Machine Learning (16)
Deep Learning (14)
Embodied AI (1)
Robotics (3)
Reinforcement Learning (32)
Generative Model (17)
Large Language Model (5)
Representation Learning (12)
Computer Science
Computer Vision (15)
Computer Graphics (9)
Database System (11)
Math
Measure Theory (13)
Analysis (2)
Linear Algebra (17)
Table of Contents
Spatial Mathematics
Spatial Descriptions and Transformations
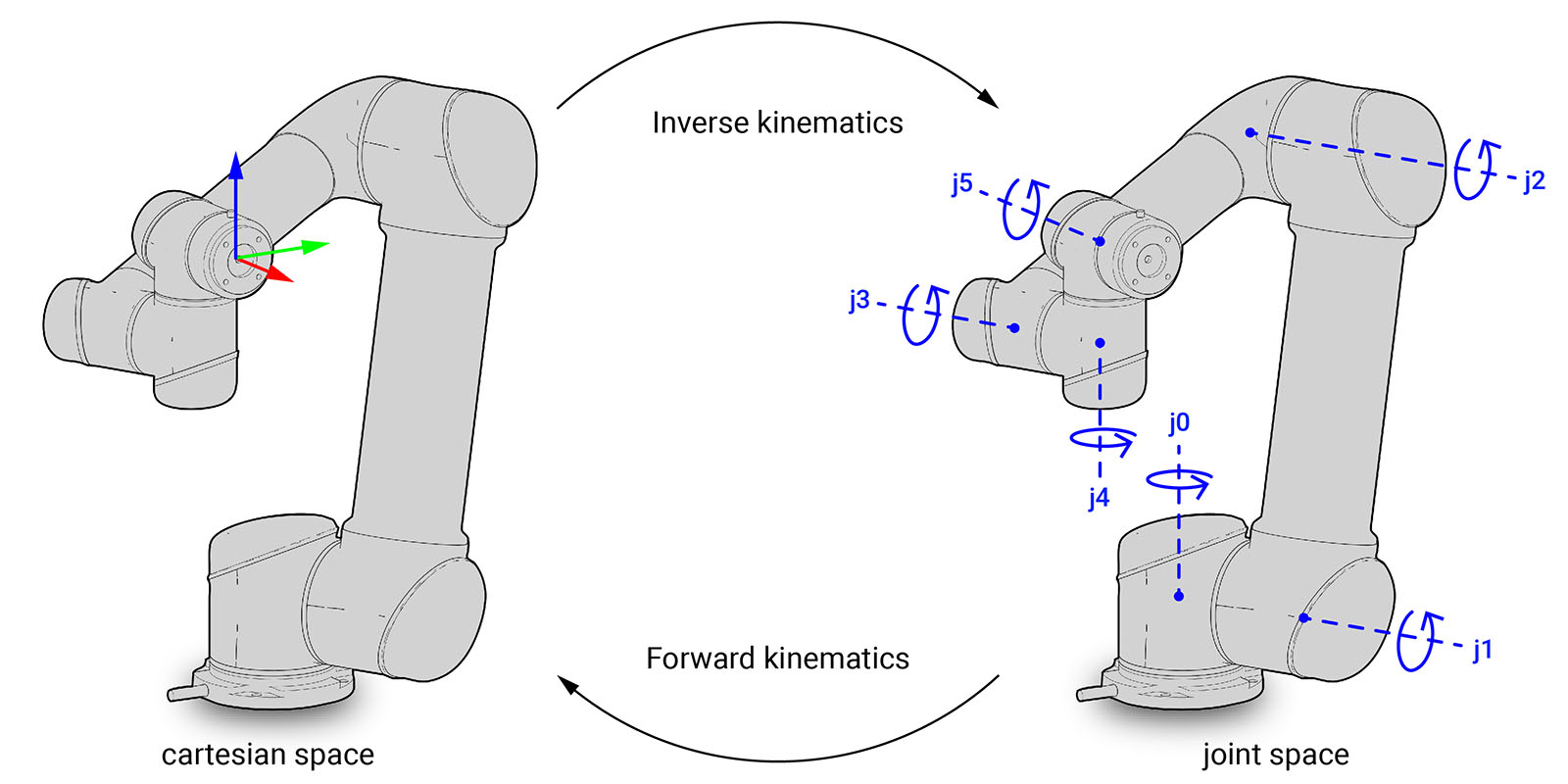
[Robotics] Forward Kinematics
Category:
robotics
Posted:
May 27, 2026
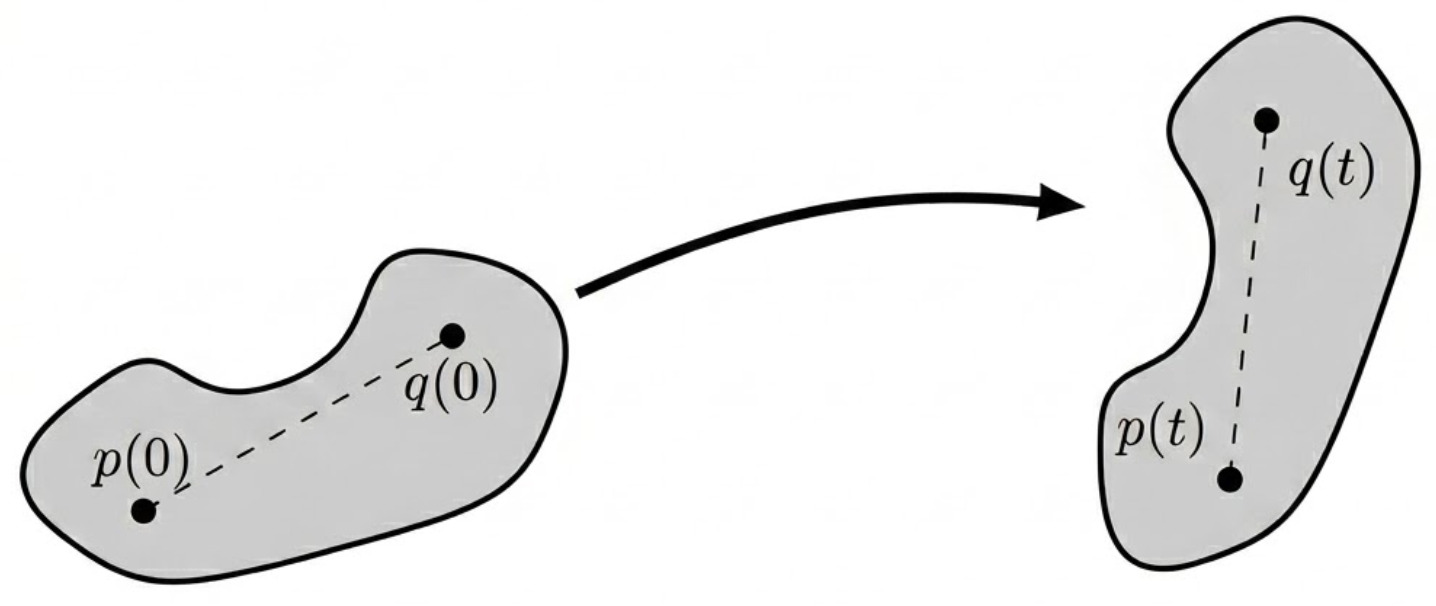
[Robotics] Rigid-Body Motion
Category:
robotics
Posted:
May 26, 2026
[Robotics] Spatial Descriptions and Transformations
Category:
robotics
Posted:
May 25, 2026